Team 857 has been busy working on everything from the intake to the elevator for the robot, drilling and riveting as well as testing and sizing endlessly. All of our hard work has finally come to (almost) an end…. there is ONE MORE WEEK UNTIL BAG AND TAG! (All right, don’t start sweating.) We here at 857 are getting impatient to start competing and go travel to competitions! Check out some of these cool pictures of our progress building the robot from start to (almost) finish…..
Left to Right: Danielle, Kraig, Abby, Soham, Gabrielle, Tyler
We’ve now come to the end of our competition season.
At the Escanaba district event, we were semifinalists and took home the Gracious Professionalism Award, in part for the programming help we gave to teams at the event. At the Lake Superior State University district event, we were quarterfinalists and took home the Creativity Award for our gear floor intake.
This was enough for us to qualify for the Michigan State Championship event at Saginaw Valley State University. For the first time, one of our students was recognized as a FIRST Dean’s List Finalist – congratulations Danielle!
We’re halfway through the 2017 build season, and making good progress on the robot. After considering the game rules and scoring potential of various strategies, we have decided to build a “climbing gearbot”. Look out for coming updates.
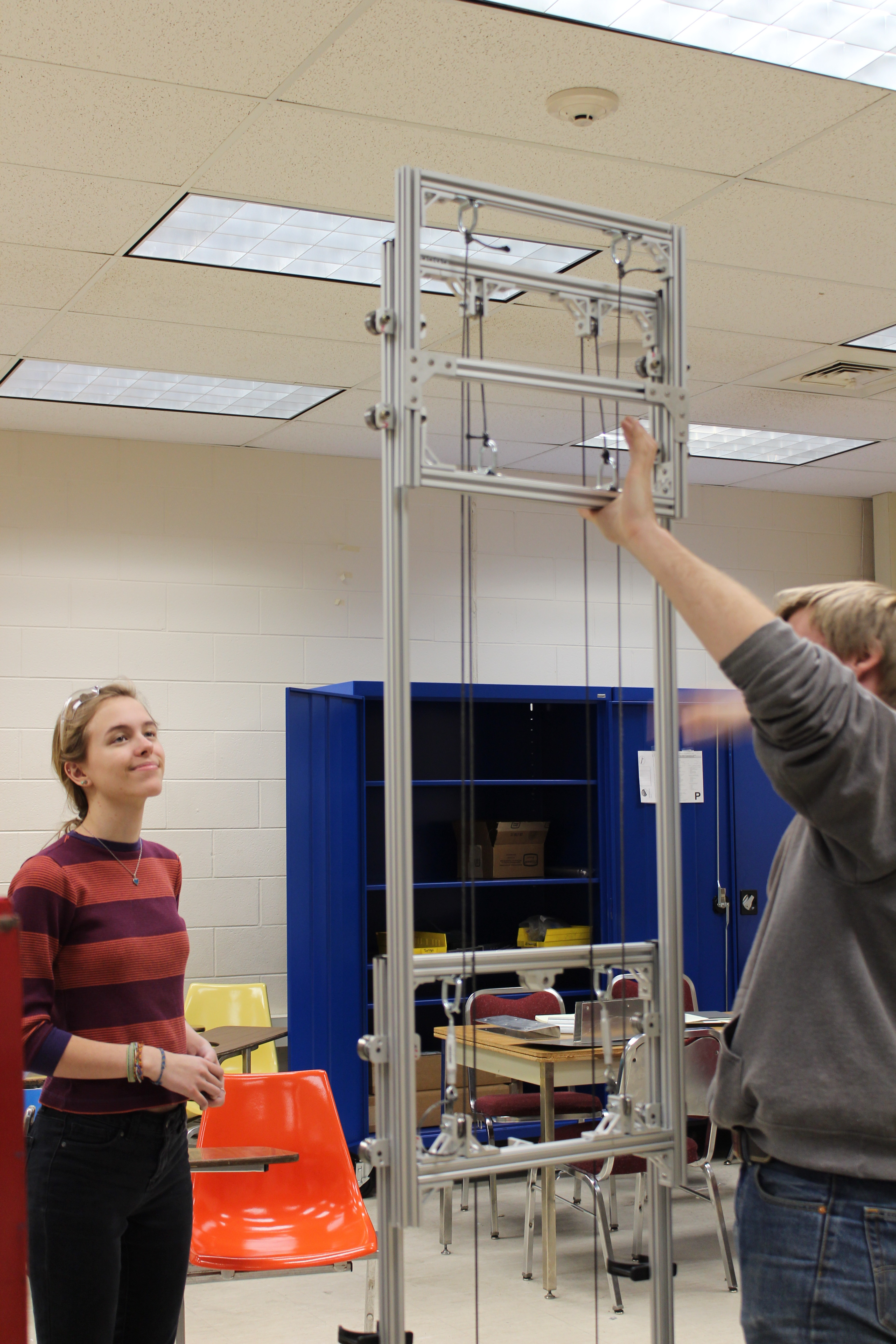
With the strategies for storming the robotics castle completed, it was time to get started building the robot. The robot is the piece that can’t be replaced, without it nothing else is usable. The team divided into several smaller teams to accomplish more at once. Each team had a particular task to complete.
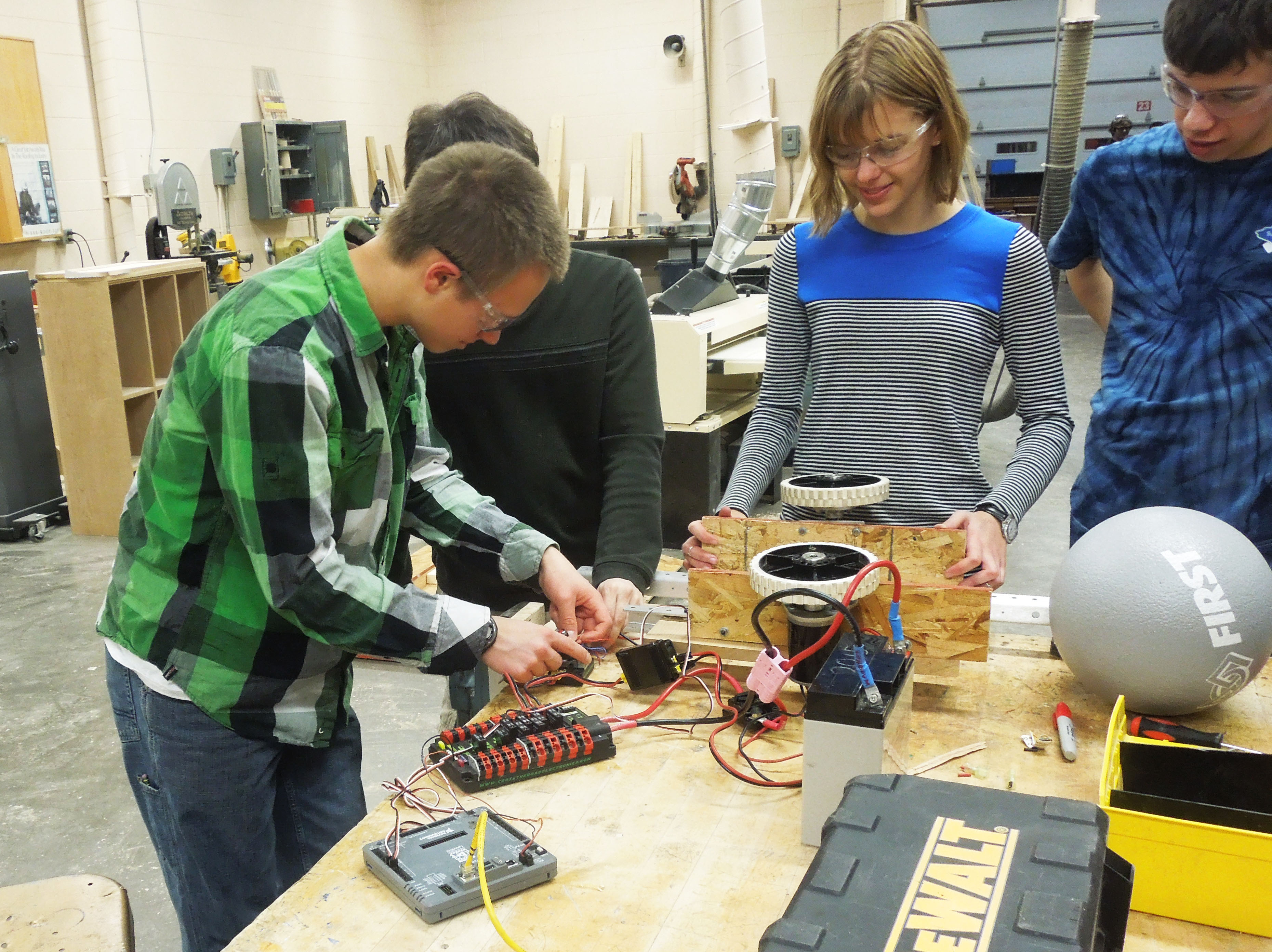
One team’s project was building the shooter that would be attached to the robot to launch the boulders at the tower. This group took the prototype wheeled launcher from last week and refined it by moving the wheels a little closer to the edge. They also worked out the space the launcher would need in the robot to function properly.
Another group kept busy building the defenses so the robot can be tested before it is taken to competition. Yet another team laid out the space claims, so the robot wouldn’t end up bigger than it was supposed to be.
Finalizing the drive train design was the task of the final group. Five wheels per side, the three center ones powered, is the basic design for the drive train. Treads were tossed out after the design for building them didn’t work. It was also decided to use chains instead of belts.
This past week the team brainstormed and prototyped. Ideas included everything from a wedge to force the portcullis up, to treads fitted over wheels in case the treads broke.
Two types of launchers were prototyped, as well as two intakes or accumulators. The first launcher was a pneumatic catapult based on our 2014 robot. This was prototyped by strapping a dust pan onto the launcher of the 2014 robot to adjust for the smaller ball. The robot was then propped up to provide a better angle for testing. The other launcher was two spinning wheels, situated to either side of where the ball would be, which would catch hold of the ball and propel it out of the robot. The wheels being positioned on the sides had the added advantage of being short enough to fit under the low bar.
Two versions of an intake were prototyped as well. The first accumulator to be prototyped and tested was an auger. The auger was supposed to work similar to how the blades of a snow blower would work (pulling the ball in toward the middle), however, it did not work properly when tested. The other intake to be tested was the 2014 accumulator, a spinning rod with rubber pieces on it, combined with the auger as a second roller. This intake did manage to collect the ball and get it over the bumper.
Across the world, hundreds of teams and thousands of students gathered for the 2016 Robotics season kickoff. Teams from Houghton, Calumet, Lake Linden, and Ewen Trout Creek were among those who waited on the edge of their seats for the 2016 kickoff video to begin. Many of the team members waited with barely contained excitement for the end of the video and the revelation of the brand-new 2016 game. This would be the game that would test the limits of their creativity for the next six weeks as they designed and built a unique robot to compete in the new game.
After the initial video revealed the game to be a medieval-themed castle attack, a series of shorter videos were watched to determine the more exact details of the field that would be competed on. Several students and mentors searched the rule book for important rules and ways to score. Once the various ways to score were established, the students broke into small groups to brainstorm ideas and designs. Many ideas were brought up and discarded, and often brought up again. The returning students brought prior knowledge and experience, while the new students brought fresh eyes and new perspectives. Everyone brought good ideas.
Overall, the 2016 Robotics kickoff was an exciting, but relaxed and friendly event. The gathered teams were more than polite to one another. They even laughed and joked together as they helped each other come up with designs and strategies for the game.

 Danielle, Jesse, John, Mentor Kevin
Danielle, Jesse, John, Mentor Kevin