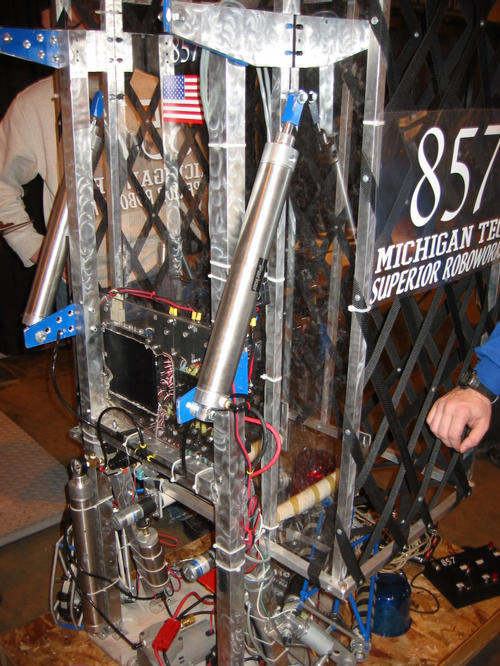
 Francois III was Team 857’s rookie robot. It was designed to pick up balls from the carpet and dump them into the goals.
Francois III was Team 857’s rookie robot. It was designed to pick up balls from the carpet and dump them into the goals.
Kiwi Drive
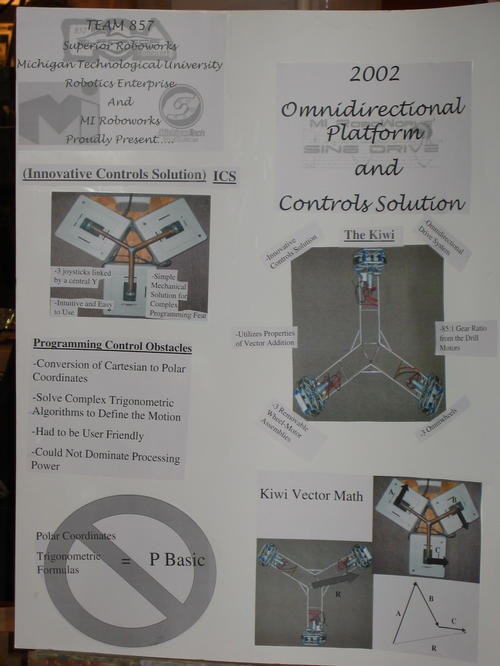
One innovative feature of the robot was its “Kiwi” drive. It used three individually powered omni wheels spaced at 120 degrees intervals. This allowed it full holonomic motion (forward/back, strafing, and turning in-place).
This robot was the first in FRC to feature such a drive train. The name “Kiwi” was a code word devised by the team to disguise that it was based on the Killough Drive Base. (ChiefDelphi post; IA)
This drive train presented a programming difficulty given the control hardware at the time (a Parallax BASIC Stamp running PBASIC), particularly in performing trigonometry or storing √3. It would be prohibitive to control the robot using a single joystick in a traditional manner. To sidestep the issue, a fully mechanical solution was implemented. Three joysticks were arranged in a pattern mirroring the drive wheels, and a central “Y” linked each together. This way, the driver could manipulate the central knob on the “Y” like a three-axis joystick, and each drive motor could simply be commanded with the joystick position without additional calculations.
|
|
|

Competitions
| Event | WLT Record | Awards | Achievements |
|---|---|---|---|
| Motorola Midwest Regional | 5-4-0 | Rookie All Star Award | |
| Western Michigan Regional | 7-5-0 | Rookie All Star Award Highest Rookie Seed |
Quarterfinalist (1-2-0) |
| The Blue Alliance entry for 2002 | |||
Gallery
 |
 |
 |
 |
 |
 |
 |
 |